作成したF-15のエネルギー機動ダイアグラムは、実機のダイアグラムと比べると異なる傾向があり、修正を行います。
計算モデルの修正
F-15の実機ダイアグラム資料※1と本ブログのダイアグラムを比較すると、傾向の相違※2があり、相違の原因の考察、計算モデルの見直し、修正を行います。※3
※1.「energy maneuverability diagram F-15」で検索しても、F-16と比べてF-15はヒットしなく、DCS(DCSWorld、デジタル・コンバット・シミュレーター・ワールド)のお世話になります。 実機資料でなくDCSの計算結果ですがマスター扱いです。
※2.絶対値の相違はパラメータ調整の対象ですが、グラフの右上がり、右下がり、丸みを帯びている、真っ直ぐなどの傾向の相違は、計算モデルの構成の何かが現実と異なっているためで、構成の見直しが必要です。
※3.ブログ投稿とネットからの入手資料拡大から、「凡そ似ている」で終わっていたモノへの見直し、修正の駆動力が増しました。一度投稿したモノへの修正、ご容赦願います。
Creation of the F-15 Energy Maneuver Diagram
投稿履歴、お問い合わせは、「航空 機動/兵装 サイトマップ」へ
新しいカテゴリーを始めました。
「1stガンダム」の二次創作考察設定です。FMA「航空 機動/兵装」テイストです。
「FMA考察設定-G」
実機ダイアグラムと作成ダイアグラムとの相違点
左図が実機資料、右図が本ブログ計算モデル(修正前)です。比較すると相違点が2箇所、存在します。
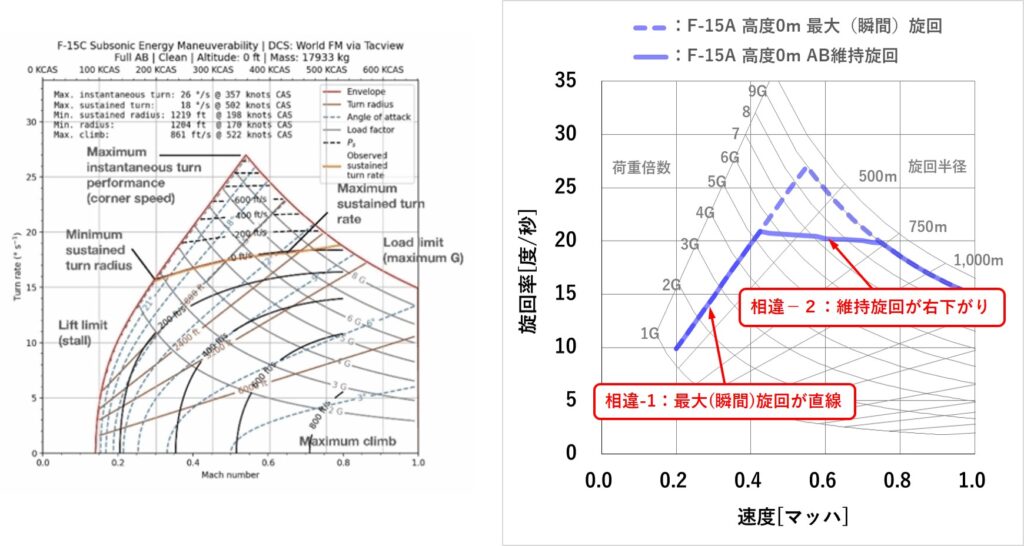
図1.実機資料(左図)と本ブログ計算モデル(修正前)(右図)との比較
飛行条件(両図とも) 推力:フルAB/クリーン/高度:0m/機体重量:17,933kg
実機資料:F-15Cのエネルギー機動ダイアグラム
出典:「Subsonic Energy- Maneuverability Diagrams for DCS」
https://www.v303rdfightergroup.com/index.php?pubs/subsonic-energy-maneuverability-diagrams-for-dcs-world.142/
相違-1:本ブログ計算モデルは、最大(瞬間)旋回が直線
本ブログの計算モデルでは最大旋回のグラフは直線ですが、実機資料では速度が落ちると曲線で落ち込みます。
何故、本ブログの計算モデルは直線なのか?、これは、円運動における加速度と半径との関係が、
「加速度=速度^2/半径」になるからです。
加速度は、「最大揚力/機体重量」であり、
最大揚力は、「最大揚力=動圧x翼面積x最大揚力係数」※4から求まり、
動圧は、「動圧=1/2x大気密度x速度^2」なので、
これを数式で整理すると、
---以下、数式---
1/2ρSV^2CLmax/W=V^2/R
(ρ:大気密度 V:速度 S:翼面積 CLmax:最大揚力係数 W:機体重量 R:半径)
両辺のv^2(速度の2乗)が消えるので、
1/2ρSCLmax/W=1/R
R(半径)は、
R=1/(1/2ρSCLmax/W)
---数式、終わる---
高度が一定(大気密度一定)ならば、半径は一定、グラフは直線になります。
※4.最大(瞬間)揚力には、エンジン推力が入りません。
円運動からの半径一定と実機ダイアグラムとの相違
本ブログ計算モデルが簡略化している項目を見ていくと、バンク角があります。
フライトエンベロープは飛行領域(最大速度、最大上昇限度)を示すもので、旋回などの機動を意識していません。しかし、エネルギー機動ダイアグラムは、「水平旋回」を定義の基準としています。
これから、フライトエンベロープとエネルギー機動ダイアグラムの対象は、以下のように異なると考えます。
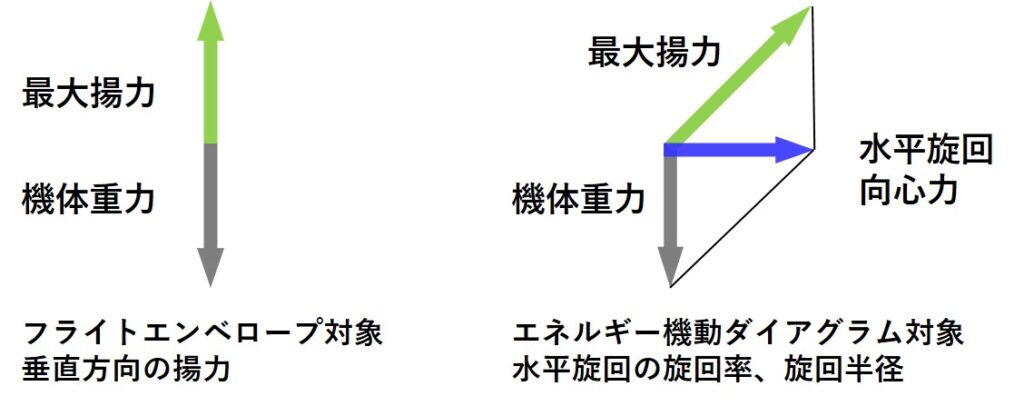
図2.フライトエンベロープとエネルギー機動ダイアグラムの対象
これから、エネルギー機動ダイアグラムでは、フライトエンベロープで求めた揚力をバンクさせ、水平旋回させる向心力を対象とし、
LT=Lcos(asin(1/L))
(LT:水平旋回加速度 L:揚力加速度 1:重力加速度 ※G単位の加速度で扱います。)
で換算します。
相違-2:本ブログ計算モデルの維持旋回は右下がり
本ブログの計算モデルでは維持旋回のグラフが(やや直線の)右下がりですが、実機資料では(丸みをもった)左り下がりになっています。
上記の水平旋回に換算しても左下がりまでにはなりません。
本ブログ計算モデル(修正前)の維持旋回算定方法
維持旋回でのエンジン推力、抗力の関係は、
推力=有害抗力+誘導抗力
であり、数式では、
---以下、数式---
T=D0+Di=D0+1/2ρSV^2CL^2/(πeAR)
(T:推力 D0:有害抗力 Di:誘導抗力 ρ:大気密度 S:翼面積 V:速度
CL:揚力係数 π:円周率 e:飛行機効率 AR:アスペクト比)
これを機体重量Wで割り、G単位の加速度にし、
1[G]の揚力係数をCL1として、揚力がn[G]となる揚力係数を「CL1xn」とすると、
T/W=D0/W+(1/2ρSV^2CL1^2/(πeAR)/W)n^2
nで整理すると、
n=((T/W-D0/W)/(Di1/W))^0.5 (Di1:揚力1Gの誘導抗力)
---数式、終わる--
になり、これより維持旋回n[G]を算定しました。
維持旋回における実機資料への合わせ込み
飛行機効率eを固定値から変動させると実機ダイアグラムの左下がりの傾向が再現できます。
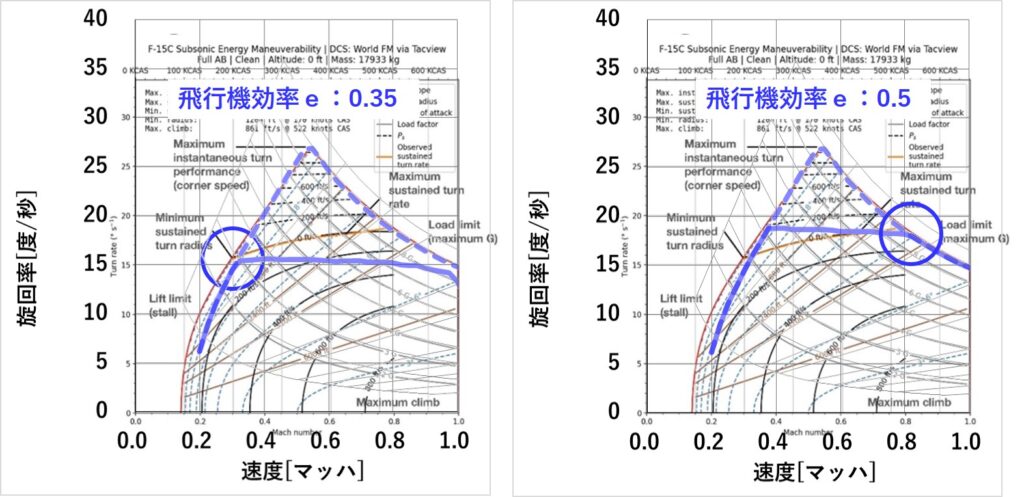
図3.飛行機効率eの調整による合わせ込み(左図:M0.3、右図:M0.8 実機資料と重ねる)
飛行機効率eのパラメータ化
これから、計算モデルは「eを迎角のパラメータ」とする修正を行いました。
迎角0度でのeを「e0」、最大迎角(揚力係数max想定)でのeを「eL」として2値を設定します。2値は、e0>eLの関係にし、迎角の増加でeは減少、分母にあるeの減少で誘導抗力を増加させることにより、低速側での維持旋回性能を落します。
揚力係数に対するeの傾斜aを、
a=(eL-e0)/CLmax
揚力1[G]でのe1を、
e1=e0+aCL1
揚力n[G]でのenを、
en=e0+(aCL1)n
とし、上記、推力、有害抗力、誘導抗力の関係式へ代入、n値を算定。(修正)維持旋回n[G]を決定します。
修正計算モデルの「エネルギー機動ダイアグラム」
バンク角を適用し水平旋回での旋回率、旋回半径を対象とし、飛行機効率eを迎角のパラメータとして高迎角では誘導抗力が増加する修正計算モデルのエネルギー機動ダイアグラムは、実機ダイアグラムとの相違点を無くし、実機資料との比較では、傾向、値を「概ね一致」させることができました。
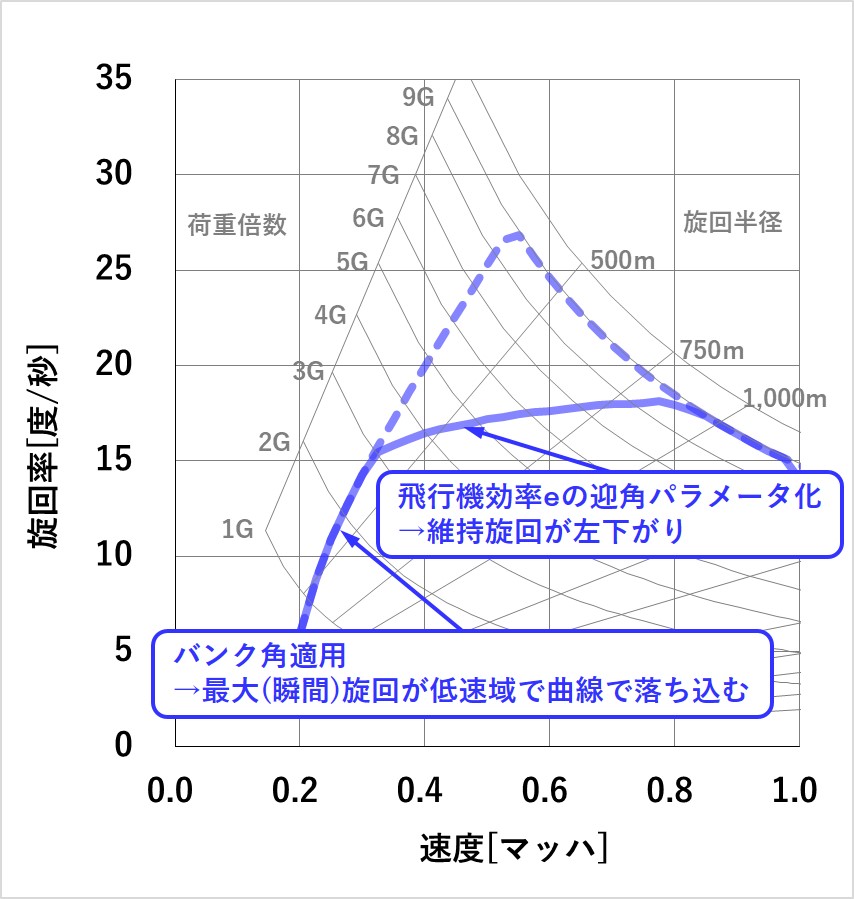
図4.修正計算モデルの「エネルギー機動ダイアグラム」
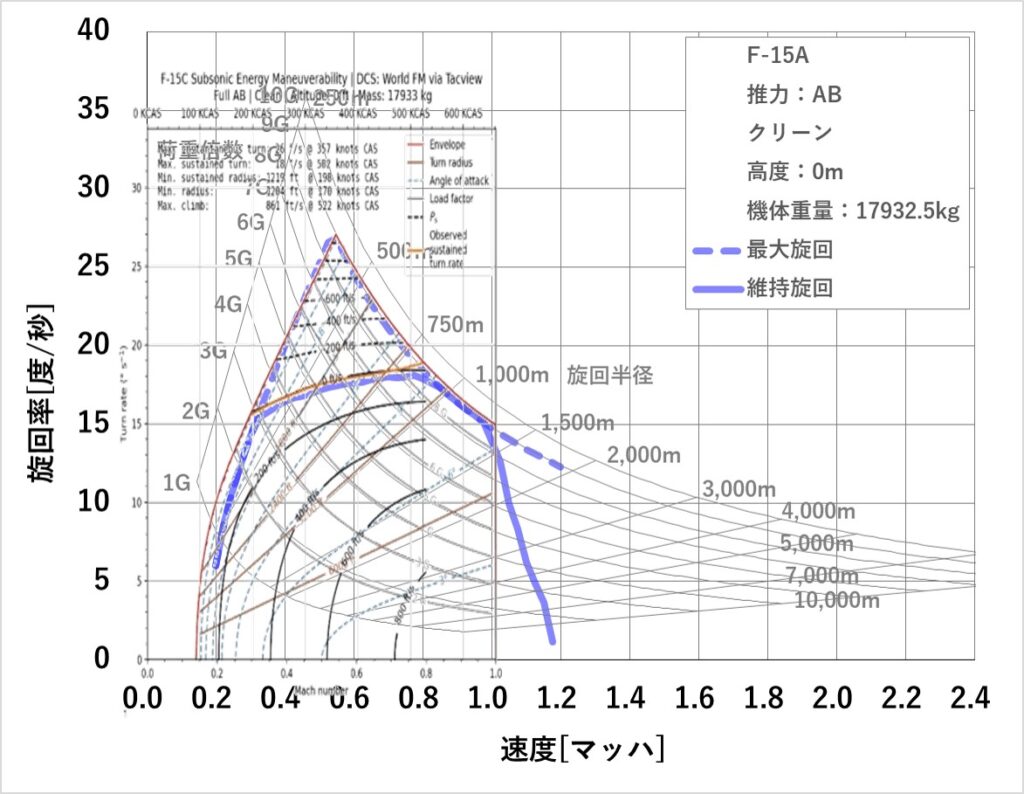
図5.実機資料と本ブログ計算モデル(修正後)との比較(両図を重ねる)
飛行条件(両図とも) 推力:フルAB/クリーン/高度:0m/機体重量:17,933kg
実機資料/F-15Cのエネルギー機動ダイアグラム
出典:「Subsonic Energy- Maneuverability Diagrams for DCS」
https://www.v303rdfightergroup.com/index.php?pubs/subsonic-energy-maneuverability-diagrams-for-dcs-world.142/
所感
直線飛行の飛行領域ではなく、低速域、高G飛行における高迎角での飛行性能の比較を主眼とするエネルギー機動ダイアグラムの有効性を認識しました。
「飛行のはなし」(加藤寛一郎 技報堂出版)で飛行機効率eを知り、それから固定値で使い続けていましたが、「飛行のはなし」をよく読むと、「近似的に次式で表わされる。」とありました。
見直し、修正は必要ですね。
補足-誘導抗力の関数
上記の個人的な考察プロセスは”実録”です。が、投稿前に、もう一度資料を見に行くと「DCS」「Subsonic Energy- Maneuverability Diagrams for DCS」の「Theory」に、

誘導抗力は、揚力係数CLの関数で示されていました。
ルックダウン広域サーチは必要ですね。