戦闘機の旋回性能を荷重倍数[G]のみでなく、旋回率[度/秒]、旋回半径[m]も含める「エネルギー機動ダイアグラム」を作成します。
「機動性能計算.xlsx」について
「機動性能計算.xlsx」は、Microsoft Excelを使用した航空機の飛行性能計算モデルです。
機体、エンジンの諸元とマッハ数で推移するパラメータをエクセル内で設定しエクセルが飛行性能を計算。その計算結果をエクセルのグラフ機能でフライトエンベロープ、エネルギー機動ダイアグラムのフォーマットで出力するものです。
計算モデルは特定の機種に特化したものではなく、各機固有の設定をすることで各機の飛行性能を計算します。
Creation of the F-15 Energy Maneuver Diagram
投稿履歴、お問い合わせは、「航空 機動/兵装 サイトマップ」へ
新しいカテゴリーを始めました。
「1stガンダム」の二次創作考察設定です。FMA「航空 機動/兵装」テイストです。
「FMA考察設定-G」
計算モデルの改訂について
計算モデルをrev.3からrev.4へ改訂します。
初回投稿以後、計算モデルの構成、モデル設定値の変更を継続的に行っています。
これは、計算モデルの結果と実機飛行性能資料との差分を解消するようモデル構成を修正し、新たに入手した実機資料の情報をモデルへ反映するためです。
変更内容:rev.3で適用
・誘導抗力の計算に含まれる「飛行機効率」を固定値から、迎角(揚力係数)のパラメータにする。
・エネルギー機動ダイアグラムの旋回Gは、「バンクをする水平旋回」を使用する。
上記の修正内容詳細は、ブログ「F-15のエネルギー機動ダイアグラム修正」をご参照ください。
・高々度の「レイノルズ数」低下によるエンジン圧縮機、タービンの効率低下を適用する。
上記の修正内容詳細は、ブログ「F100ターボファンの計算ー3「レイノルズ数補正」」をご参照ください。
変更内容:rev.3以後の内容、rev.4で適用
・有害抗力係数:実機資料を使用
F-15の有害抗力係数は、亜音速、超音速領域ともF/A-18に次ぐ高い値を設定。
・ラム圧力回復係数:実機資料をベースに調整したものを使用
亜音速、遷音速領域を理論値”1”としない。
上記の修正内容詳細は、ブログ「F100ターボファンの計算ー4「ラム圧力回復係数」」をご参照ください。
F-15A/C計算モデルの機体、エンジン設定
表1.がF-15A/C計算モデルにおける、機体およびエンジンの設定値です。
黒字は雑誌、書籍、ネット等で公表されているカタログ値です。青字は入手できなく実機性能から逆算、調整して決定したものです。
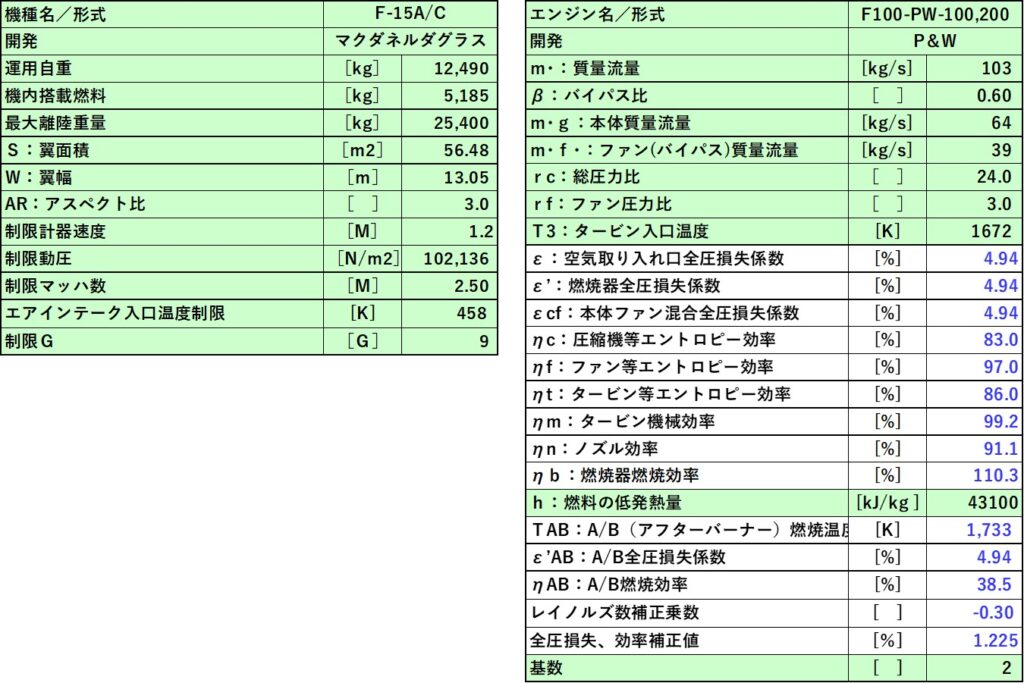
黒字:実機資料値 青字:計算モデル調整値
F-15A/C計算モデルのマッハ数パラメータ
計算モデルの飛行領域を亜音速のみではなく遷音速、超音速まで拡大させると、最大揚力係数、有害抗力係数、誘導抗力係数、ラム圧力回復係数を単一の値で扱うことはできません。
マッハ数で推移していくからです。
マッハ数パラメータは、図1のグラフライン上のマーカーを代表値として設定し、その間を関数で補間します。その補間関数から、M=0から最大速度までのマッハ数と対応するパラメータ値を求めます。
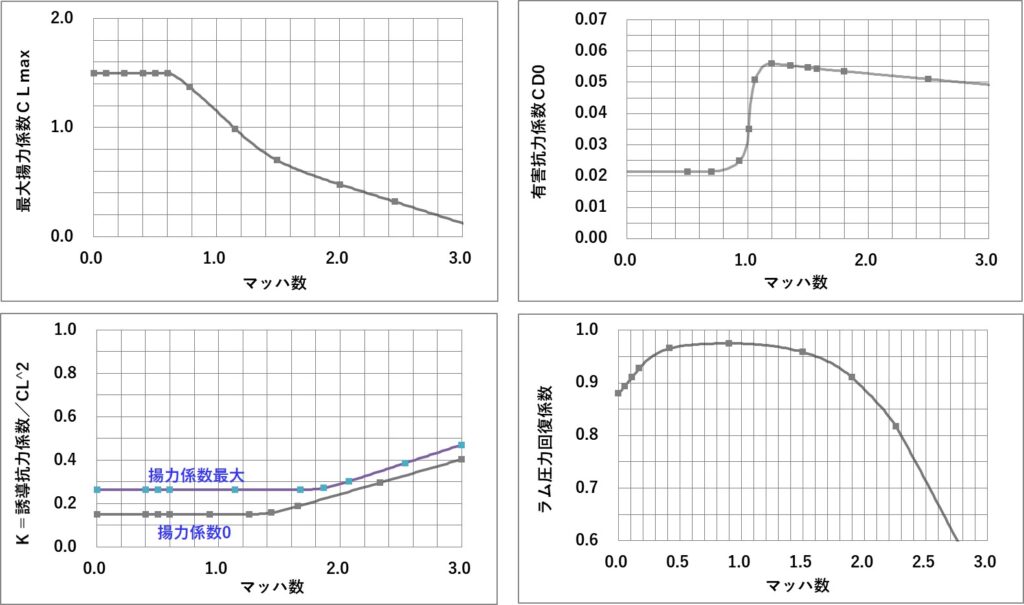
実機資料のモデル設定への適用
有害抗力係数、ラム圧力回復係数は、実機資料を入手できたので、それらを適用します。
「有害抗力係数」は、実機資料をトレース。
「ラム圧力回復係数」は、実機資料をベースにフライトエンベロープおよび水平維持旋回Gが実機資料と合致、近づくよう調整しました。
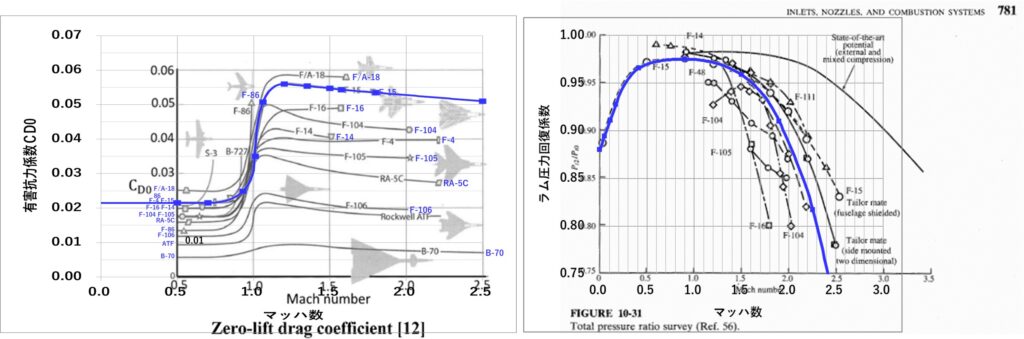
左図有害抗力係数出典:「Aerodynamic design and evaluation of an open-nose supersonic drone」:Sage Jpurnals画像アドレス:https://journals.sagepub.com/cms/10.1177/09544100221084389/asset/images/large/10.1177_09544100221084389-fig4.jpeg
右図ラム圧力回復係数(全圧力回復)出典:「Elements of Gas Turbine Propulsion」:Jack D. Mattingly
※青ライン、青文字名は、本ブログが追記
飛行性能からのモデル設定の調整
最大揚力係数、誘導抗力係数の実機資料は入手できなく、
「最大揚力係数」は、実機の最大揚力Gの資料から調整し決定、
「誘導抗力係数」は、フライトシム関連のエネルギー機動ダイアグラム資料から調整し決定したものです。
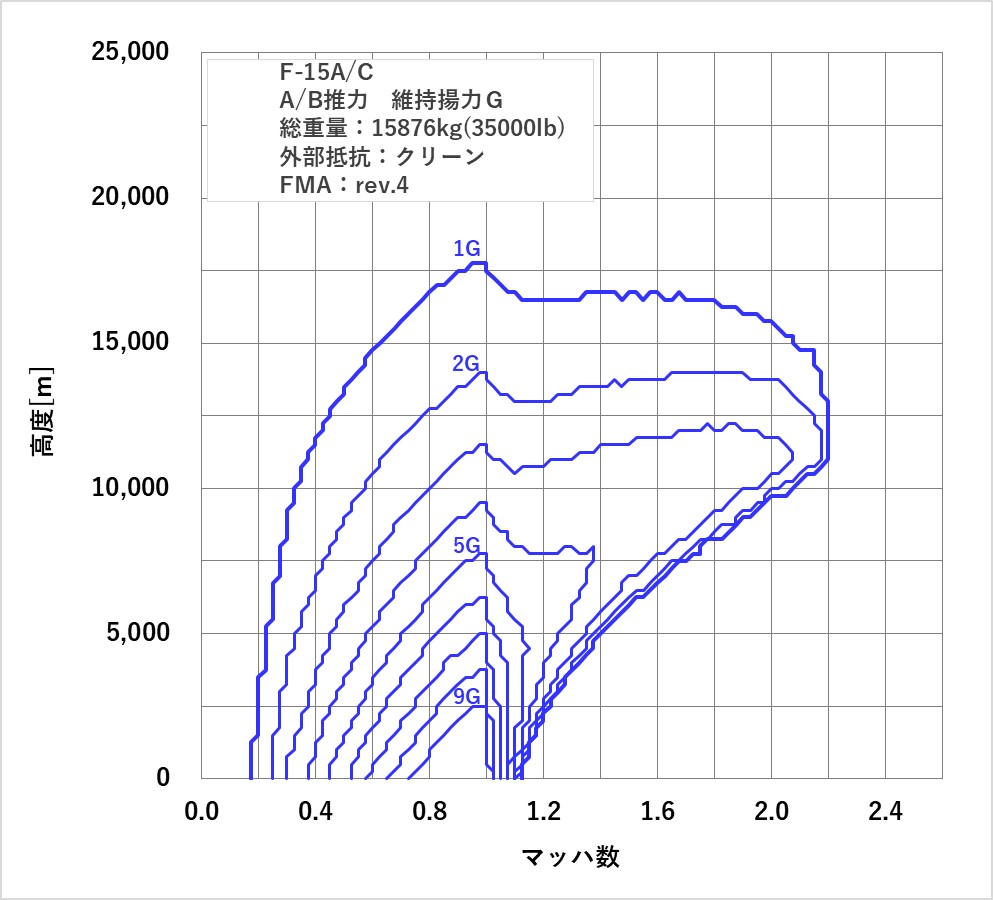
F-15A/C計算モデルのフライトエンベロープ
表1,図1を設定(エクセルのセルに入力)すると、エクセルは計算からグラフ化までを”閉じて”行ってくれます。
フライトエンベロープと維持揚力G※1は、図3のように作図されます。
カクカクしているのは、連続性を持って計算するのではなく、速度と高度を離散化(速度0.025M、高度250mで分割)し、セル行列で計算するためです。
※1.フライトエンベロープでのGは、水平直進飛行状態で継続維持可能な「揚力」の荷重倍数を扱います。
エネルギー機動ダイアグラムについて
エンベロープに引き続きエクセルは、ジョン・ボイドが提唱した「エネルギー機動性理論」で使われる「エネルギー機動ダイアグラム」を作図します。
フライトエンベロープは、高度、速度に対する飛行領域、荷重倍数などの”分布”を図示するものですが、「エネルギー機動ダイアグラム」は、ドッグファイトで対抗機との位置関係、アスペクト角、アングルオフ角の推移を考察する際に必要とする「旋回率」、「旋回半径」を図示するものです。※2
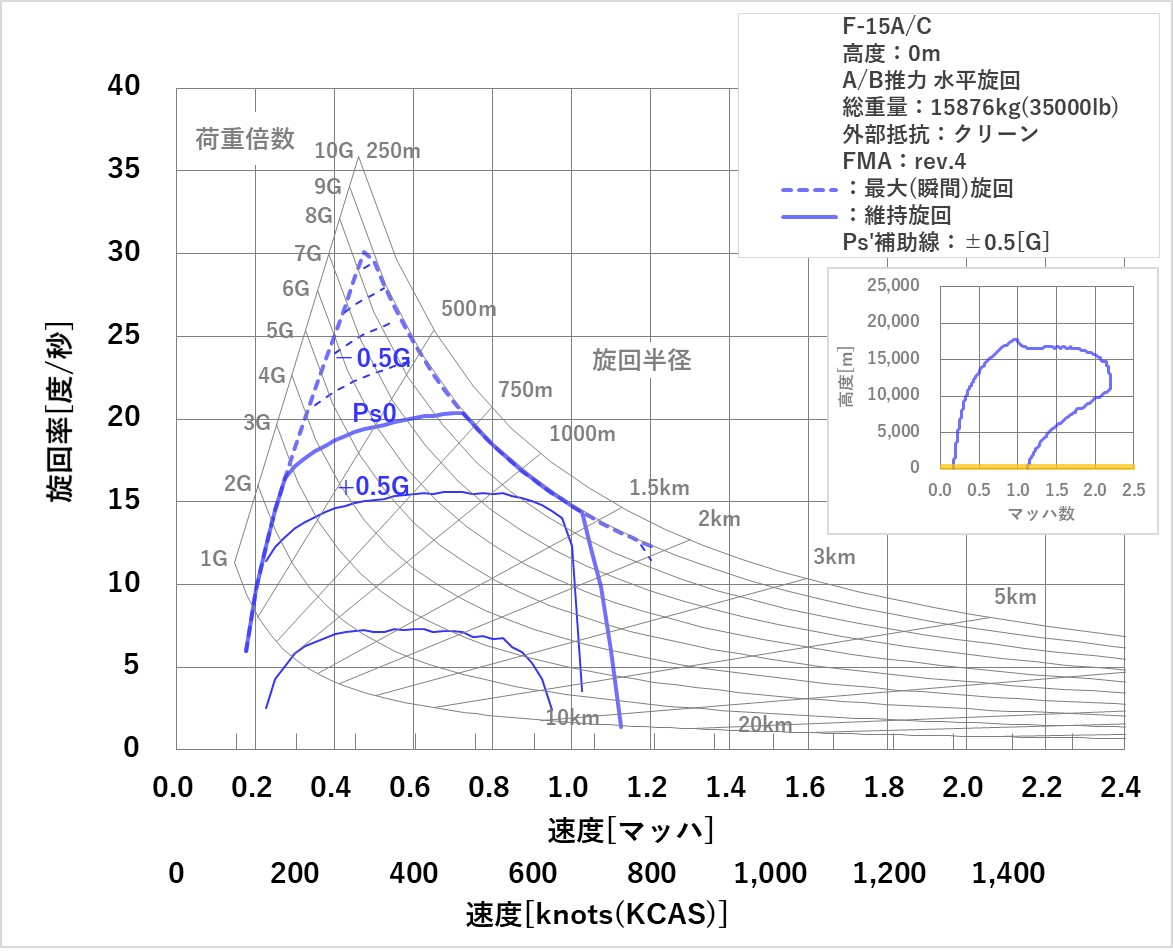
「エネルギー機動ダイアグラム」のフォーマットは、
・特定の「高度」における性能を扱う。
・航空機の「最大」および「維持」の「水平旋回」※3を扱う。
・横軸「速度」、縦軸「旋回率」のグラフ。
・グラフには「荷重倍数」と「旋回半径」の補助線がある。
・「機体のエネルギーの過不足」を示す補助線がある。
※2.グラフ情報からの説明で、「エネルギー機動性理論」の視点ではありません。
※3.水平旋回Gは、バンク角を取る水平面内での旋回です。水平旋回1Gは、バンク角45度、揚力1.41(√2)Gの旋回です。
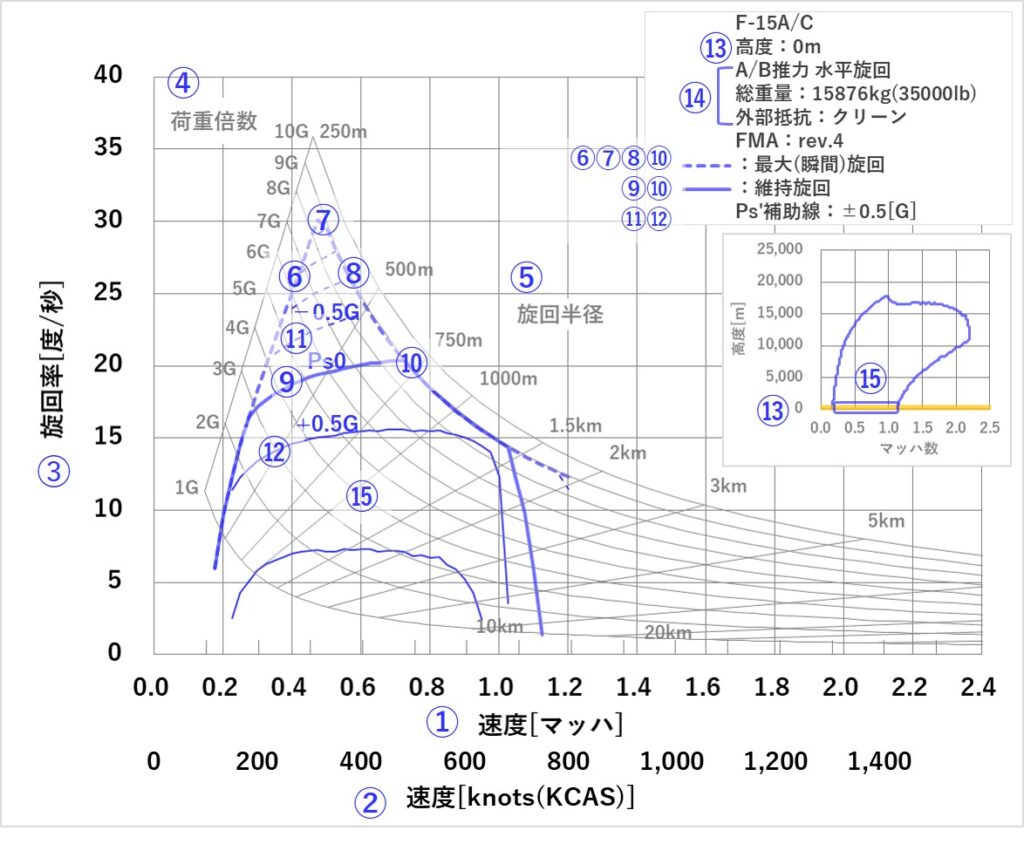
横軸速度は通常①マッハ数を使用し、本ダイアグラムでは②ノットも記しています。
(音速は大気温度で変化するので、高度が変わると、マッハ数とノットの比率も変わります。)
縦軸の③旋回率は、1秒間に何度、旋回(飛行の方向を変えることが)できるか。
④荷重倍数は「G」単位で、右下がり(同じGでも速度が増加すると旋回率は低下)の補助線、
⑤旋回半径は、右上がり(同じGでも速度が増加すると旋回半径は増加)の補助線です。
「速度」「旋回率」「旋回半径」から、水平面上の旋回を定量的に決定できます。
⑥⑦⑧の破線は、最大旋回を示します。
左側の⑥は、迎角を最大にし揚力係数を最大にしているが、動圧が不十分な状態。速度の増加により動圧は増加、荷重倍数が増加していきます。荷重倍数が機体強度の制限Gに達するポイント⑦(制限Gの最小速度)が航空機の最大旋回率になります。⑦以後は制限Gのラインに沿っていきます。⑧の動圧は十分ですが、機体強度から迎角を最大から緩めなくてはいけません。
⑨の実線は、「推力-(有害抗力+誘導抗力)=0」状態の維持旋回を示します。
Ps(Specific Power、エネルギー比率)は、”0”です。
大推力のF-15は、機体強度限界での維持旋回⑩が可能です。
本ブログのダイアグラムPs補助線は上昇率[feet/s]ではなく、加速度Gを使用しています。
Psの定義式は、
Ps=V(T-D)/W
V:速度 T:推力 D:抗力 W:重量
なので、加速度は「Ps/V」になります。
⑪は「T<D」の状態でありPsはマイナスです。⑪Ps-0.5Gは、そのGで旋回をすると0.5Gで減速されます。そのため、維持旋回より上のマイナスPs領域では、そのGで旋回できるのは「瞬間」になります。(または、不足分を重力で補うよう降下しGを維持する)
実線のPsは「T>D」の状態でPsはプラス。⑫Ps+0.5Gでは、そのGで旋回を続けてもまだ、0.5Gの増速、または上昇が可能です。
ダイアグラムの右上には、⑬対象高度、⑭計算モデル設定(推力、機体重量、外部抵抗)、フライトエンベロープを記載しています。A/Bは、アフターバーナーの略称。
エンベロープは全高度域を含むものですが、ダイアグラムはエンベロープの対象高度を切り出したものになります。
⑮最小速度、最大速度、維持9Gなどが、エンベロープとダイアグラムを関連付けます。
高度0mにおけるF-15のエネルギー機動ダイアグラム
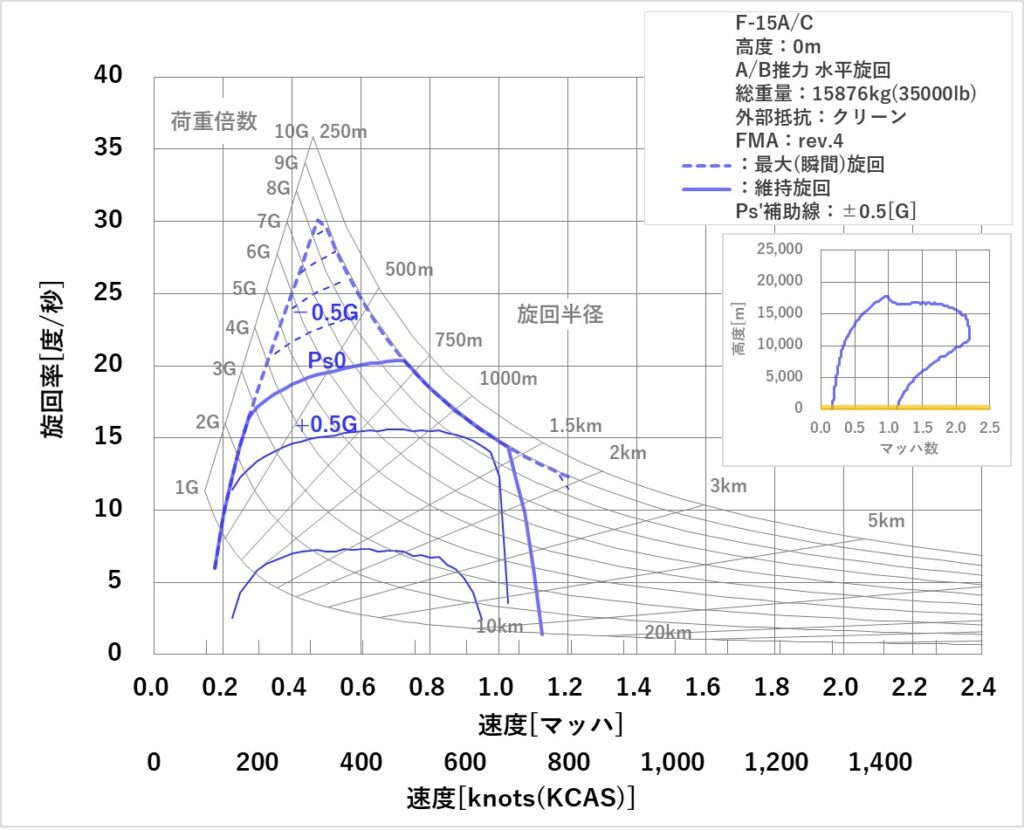
高度0m、濃い大気は潤沢な空気をエンジンへ送り込み、主翼を天使の翼にしてくれる風を与える。
マッハ0.5、スロットルレバーをA/B(アフターバーナー)ゾーンへ押し込み、バンクを深めスティックを引き機体強度限界の9Gで旋回。
揚力の増加で誘導抗力が急激に増え、膨大なパワーのエンジン推力をも食い始める。最大旋回率と引き換えに速度が削られていく。
対抗機が視野に入る。操縦桿を緩め、脳内酸素と機体エネルギーの消費を抑える。
タイミングを見てプラスのPs旋回で機体エネルギーを回復、Psマネージメントにより旋回パフォーマンスを維持し旋回を継続させていく。
最大旋回率30度/秒でのPsは-2G。
簡易計算で、5秒間の1Gは100ノットの加減速になります。
30度/秒の最大旋回率との引き換えに2Gの減速、この取引の良否は?
維持旋回では6Gで旋回率20度/秒、旋回半径500m。直径1kmの円(町内ならここからあそこまで)を1周18秒、秒針の3.3倍の円運動になります。
ただし、耐Gスーツを着用してもトンネル視野になるGレベルなので心循環系代謝のマネージメトが必要となります。
高度5,000mにおけるF-15のエネルギー機動ダイアグラム
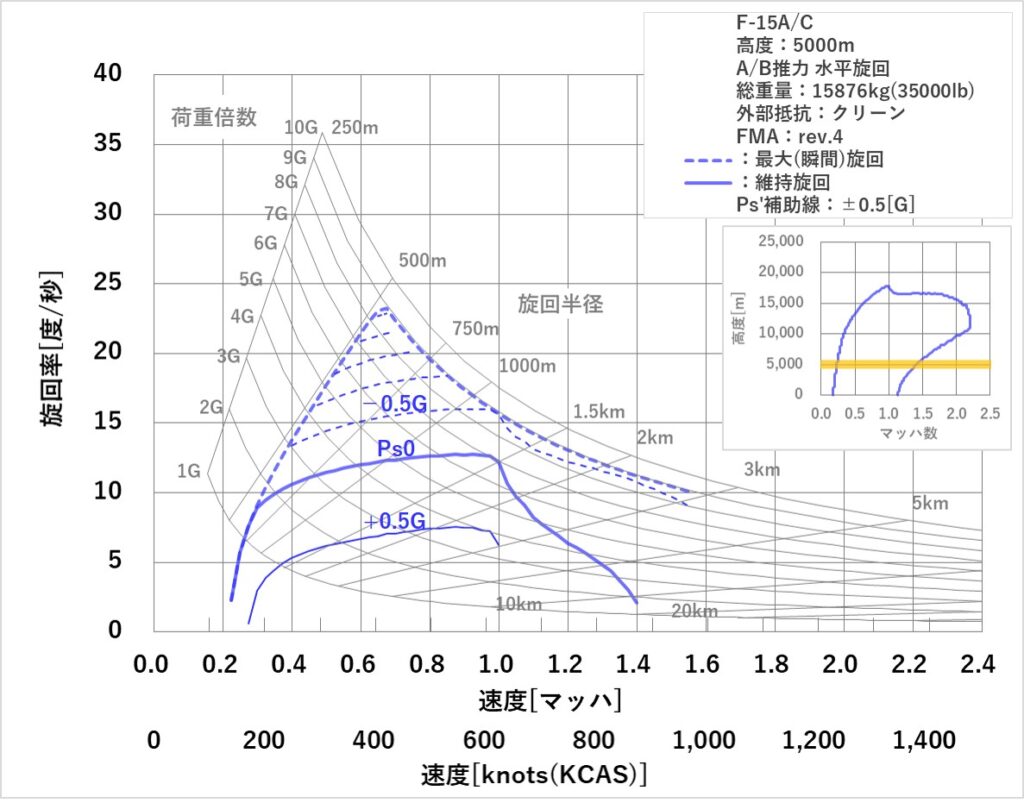
高度が上がると空気密度が下がり動圧が低下するので、同じ旋回Gをするためには揚力係数を増加させる必要があります。揚力係数の増加は誘導抗力を増加させ、エンジン推力も質量流量(1秒間にエンジンが吸込み、吐き出す空気質量)が減少するので推力ダウン、「Ps0」ラインは落ちてきます。
高度10,000mにおけるF-15のエネルギー機動ダイアグラム
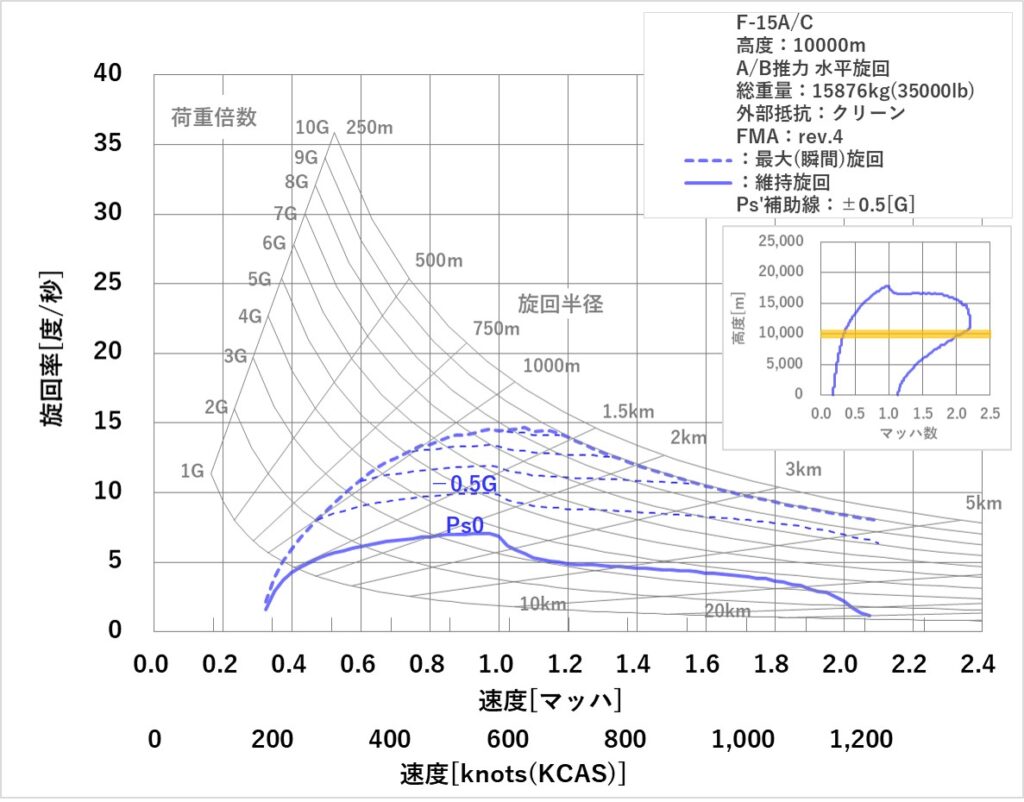
高度で温度は変化するので音速は高度によって異なります。そのため同じマッハ数でも高度が変わると絶対速度は違い、荷重倍数と旋回半径は4枚のグラフで微妙に変化しています。
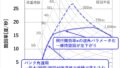
高度15,000mにおけるF-15のエネルギー機動ダイアグラム
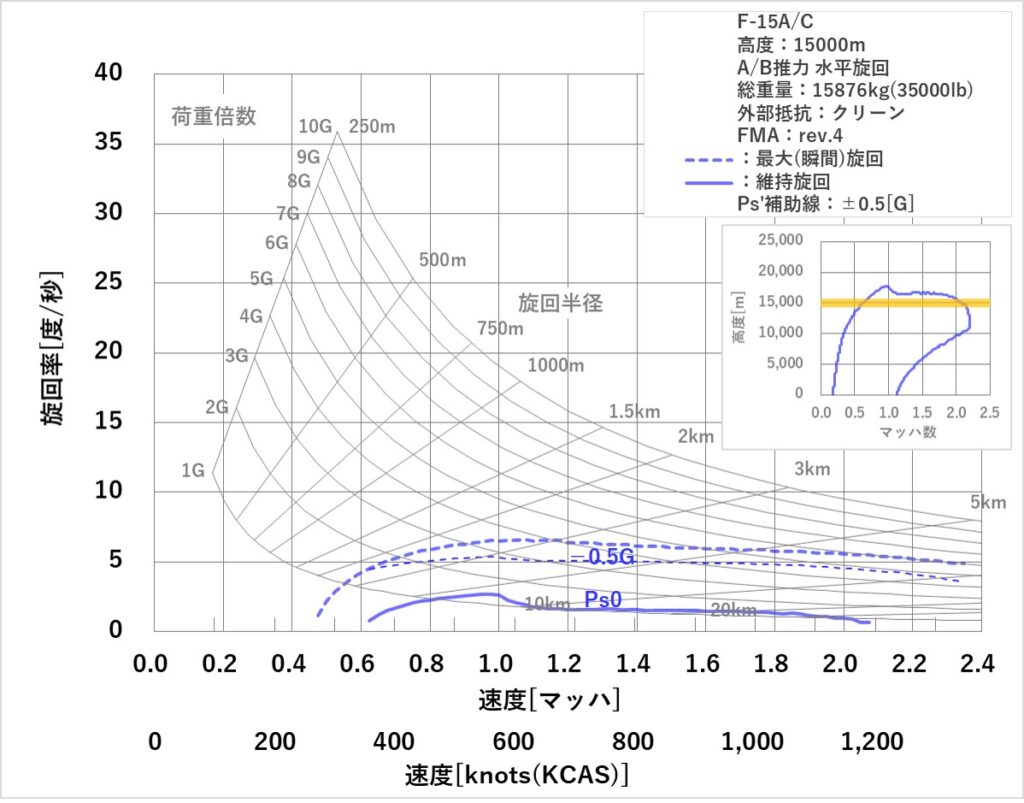
最大上昇限度付近となると、旋回は緩やかなものになります。M0.8付近での旋回率は2度/秒程度、360度旋回は180秒掛かります。
所感
「エネルギー機動ダイアグラム」からは旋回率、旋回半径が分かるので、ドッグファイトにおいて、どの程度有利なのか、何秒後には、どのような状況になるかが具体的な数字で見えてきます。
このダイアグラムを計算するエクセルファイルを作成していますが、感覚としてはフルスクラッチビルドです。
工具を購入した、新しいモデリングテクニックを知った、このアングルでの写真を見つけたので、ゴソゴソと机の上のモデルを手直しする感じです。
一人、自己満足をするが、しばらく経つと「エー、そうだったの。」「一致していると見えていたけど、この頃はどうも・・・。」となって、再びゴソゴソを始める。
なので、ブログは、不定期に改訂される場合があります。
変更内容を記載するので、ご容赦願います。
また、さも知っているような書き方をしていますが、あくまで個人が計算したら、こうなった、自分はこう解釈している話です。